
Are you struggling with unexpected power failures in your robotic projects?
Unreliable power sources cause system shutdowns and hardware damage. We provide this comprehensive guide to help you overcome these engineering challenges and e the perfect power source for your advanced robotics.
A robot dog battery supplier guide from prototype to mass production answers the core question of how to source, test, and manufacture reliable power systems for quadruped robotics. It covers engineering parameters, real-world testing, custom lithium battery pack design, and BMS integration.
This ensures the final power module meets the strict discharge, capacity, and thermal management requirements needed for dynamic robotic movements.
We will explore the critical technical solutions below to help you retain structural integrity and power efficiency.
Table of Contents
- 1. What is a Quadruped Robot or Robot Dog?
- 2. Why Are Li-Po Batteries Preferred for Robotics?
- 3. How Do We Build a Battery Runtime Calculation Model?
- 4. What Is the Ideal Battery Pack Design Solution?
- 5. How to Choose a Reliable Battery Supplier?
1. What is a Quadruped Robot or Robot Dog?
A quadruped robot, commonly known as a robot dog, is a four-legged mechanical device designed to navigate complex terrains. These machines require a highly efficient power source to perform dynamic movements like walking, running, and jumping.
They are utilized heavily in electric mobility and security sectors, demanding robust and lightweight engineering solutions.
To fully understand this robot dog battery supplier guide from prototype to mass production, we must analyze what these machines are mechanically.
A legged robot or quadruped dog faces unique kinematic challenges compared to traditional wheeled vehicles. A quadruped mech requires constant power bursts to maintain balance and execute sudden jumps. Therefore, a standard quadruped robot battery must handle exceptionally high peak currents[1] without voltage sag.
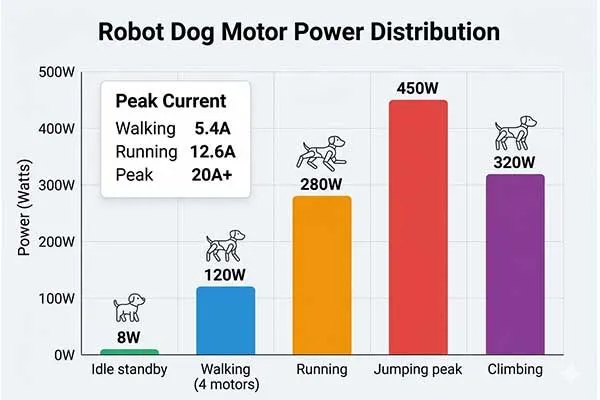
Power Demand of Robot Dogs
Quadruped robots demand high motor power bursts, so a robotic dog battery pack must handle large instantaneous currents.
For example, Boston Dynamics’ Spot uses a 50.4V 11.2Ah (≈0.6kWh) pack for ~90min runtime, implying ~380W continuous load. ANYmals battery is ≈48V 20Ah (932Wh) for 90–120min. Heavier platforms like Unitree B2 use 58V 45Ah (2250Wh). Smaller models like Unitree’s Go2 use just 29.6V 8Ah (236.8Wh).
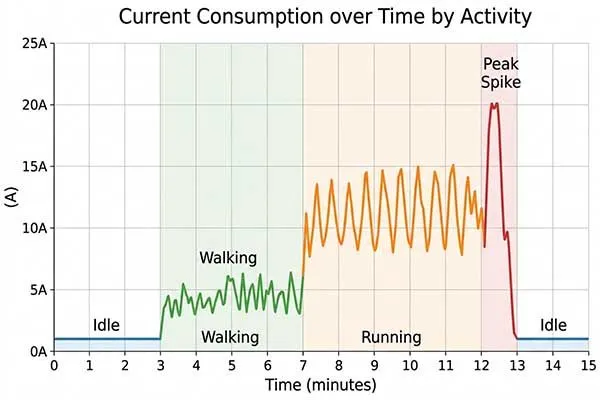
Each leg’s actuator can draw dozens of amps in short bursts, so engineers calculate torque and speed to estimate these peaks and choose the robot battery’s C-rate[2] to match.
Evaluating Quadruped Power Needs
| Application Type | Average Current Draw | Peak Burst Current | Required Voltage |
|---|---|---|---|
| Industrial Inspection | 10A – 15A | 40A – 50A | 24V / 48V |
| Security Patrol | 15A – 20A | 60A – 80A | 48V |
| Consumer Recreation | 5A – 10A | 25A – 30A | 12V / 24V |
In our engineering experience, the use cases range from industrial pipe inspection to emergency search and rescue. A quadruped robot dog battery needs to power complex servo motors instantly.
When users look for a robot dog battery replacement, they often seek a reliable custom lithium battery pack to enhance uptime and reduce weight. This means any battery module robotics engineers select must be exceptionally durable.
We often see requests for an OEM battery solution that fits the chassis of electric qaudruped robots perfectly. Integrating a smart BMS for robotics battery ensures longevity. We evaluate these strict requirements through rigorous engineering parameters and physical testing.
We promise a stable peak current delivery.
Optimize Power for Dynamic Robotic Loads
We promise a stable peak current delivery.
2. Why Are Li-Po Batteries Preferred for Robotics?
Li-Po batteries are preferred for robotics because they offer a high energy density, lightweight footprint, and exceptional discharge rates. These characteristics are critical for handling the sudden power spikes required by motor actuators.
Unlike traditional cylindrical cells, lithium polymer configurations can be customized to fit irregular spaces.
What Battery Types Are Using on Robot Dogs
| Chemistry Type | Energy Density | Discharge Rate (C-Rate) | Form Factor Flexibility |
|---|---|---|---|
| Lithium Polymer (Li-Po) | 180-250 Wh/kg | Very High (up to 100C) | Excellent (Customizable) |
| Lithium Iron Phosphate (LFP) | 90-160 Wh/kg | Moderate (up to 30C) | Poor (Rigid Cells) |
| Nickel Manganese Cobalt (NMC) | 150-220 Wh/kg | High (up to 50C) | Moderate (Cylindrical) |
As we explore this robot dog battery supplier guide from prototype to mass production, the choice of chemistry is paramount. Jack Song, our chief engineer, recently led a demanding project for a US security robot manufacturer to build a specific quadruped robot battery.
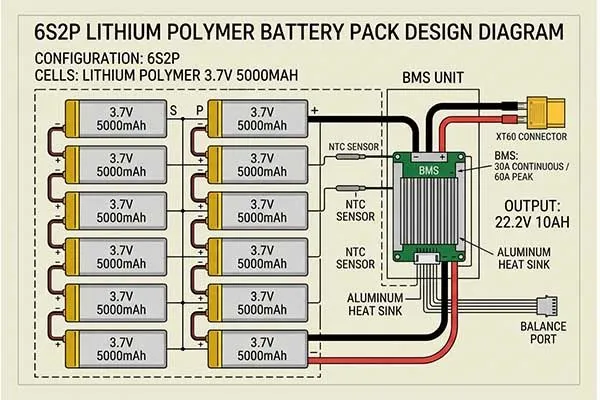
The project required a robot dog lithium polymer battery configured as a 21.6V 5.2Ah 6S2P pack. The initial tooling cost was $3,200, and the required battery size was strictly limited to 110mm x 55mm x 40mm.

During our initial real test phases, we encountered severe engineering problems: the continuous discharge rate was insufficient for the robot’s jumping mechanism, and integration was difficult due to tight wire routing constraints inside the chassis.
We resolved this by upgrading the cell’s C-rate and modifying the thermal dissipation layer[3]. The entire order timeline, from the prototype to the final OEM battery solution, took 45 days.
This case proves that a robotic dog battery must be highly adaptable. An effective custom lithium battery pack solves strict space and power constraints for any robot dog battery application.
High Energy Density for Agile Robotics
Lightweight, high discharge
3. How Do We Build a Battery Runtime Calculation Model?
Building a battery runtime calculation model[4] involves measuring the nominal voltage, total capacity, and the continuous current draw of the robot’s motors and sensors. By dividing the total watt-hours by the average operational wattage, engineers estimate the base runtime.
However, physical real-world tests must adjust this model.
A critical part of the robot dog battery supplier guide from prototype to mass production is accurate power forecasting. Our calculation model relies on precise engineering parameters.
If a client needs a robot battery for a specific payload, we calculate the continuous discharge and peak burst limits. For example, the battery for Unitree B2(50.4V 45Ah) or other heavy-duty quadruped robotics operates differently than a lightweight Go2 battery(29.6V 8Ah).
Test Results and Analysis
| Test Condition | Peak Current (A) | Temp Rise (°C) | Runtime (min) |
|---|---|---|---|
| Moderate Load (0.3C) | 50 | +20 | 120 |
| High Load (1C) | 100 | +35 | 60 |
| Pulsed Load | 150 | +45 | 40 |
During a real test, a quadruped robot dog pulls varying currents depending on the terrain roughness and incline. When engineers seek a robot dog battery replacement, they must ensure the new battery module robotics match the original calculation model perfectly.
We also test a quadruped robot dog battery under extreme loads to validate the BMS for robotics battery. Whether it is a vintage i-cybie battery upgrade or developing Unitree quadruped batteries, the physical validation must match the theoretical capacity.
Advanced Load Testing Models
| Operational State | Motor Load (Watts) | Sensor Load (Watts) | Estimated Runtime |
|---|---|---|---|
| Standby / Idle | 5W | 15W | 8.0 Hours |
| Continuous Walking | 150W | 20W | 2.5 Hours |
| Sprinting / Jumping | 600W | 20W | 0.8 Hours |
The robot dog battery undergoes rigorous thermal monitoring during these continuous load tests.
4. What Is the Ideal Battery Pack Design Solution?
The ideal battery pack design solution incorporates a robust Battery Management System, active thermal management, and a durable custom structural housing.
These elements protect the cells from physical impacts and prevent overcharging, over-discharging, and overheating. A proper design ensures the system handles continuous vibrations.
To master the robot dog battery supplier guide from prototype to mass production, we must address complex physical integration. We frequently solve non-standard interface problems in our custom lithium battery pack designs.
Many clients use proprietary connectors rather than standard XT60 or Anderson plugs[5], so we custom-mold specialized pogo pin interfaces to ensure reliable power transmission.
Overcoming Integration Constraints
| Interface Type | Voltage Output | Primary Application |
|---|---|---|
| Custom Pogo Pins | 12V / 5A | Lidar and Sensor Arrays[6] |
| XT90 / AS150 | 48V / 60A | Main Drive Motors |
| CAN Bus Port[7] | 3.3V / 5V | Telemetry and Diagnostics |
A high-end robot battery often requires multi-voltage outputs: 12V for Lidar and optical sensors, and 24V or 48V for the main drive motors. Handling these compatibility issues requires an advanced BMS for robotics battery that supports dual-channel output without electrical noise interference.
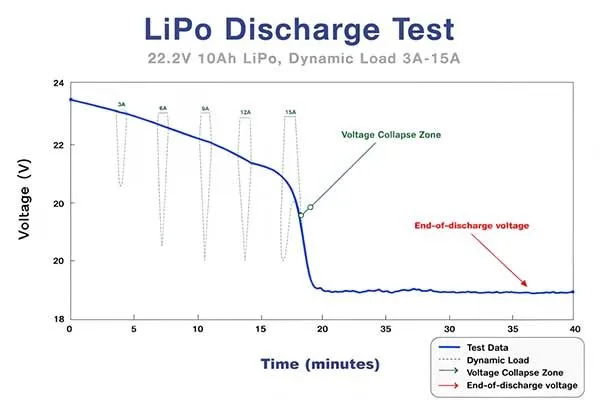
Common Failures in Robot Dog Batteries
Typical failures include voltage collapse under heavy load, overheating, and connector mismatches.
Drawing too much current causes voltage to sag sharply, triggering BMS cutoffs. Prolonged high discharge can overheat cells and reduce lifespan. Interface issues (wrong plug or voltage rails) make packs inoperable until adapted.
Preventing these failures through proper design (rated cells, thermal management, compatible connectors) avoids costly robot dog battery replacement.
| Failure Mode | Cause | Engineering Fix |
|---|---|---|
| Voltage Collapse | Excessive load or low cell C-rating | Use higher C-rate cells; increase parallel strings; adjust BMS limits |
| Overheating | High current or poor cooling | Add thermal sensors, heat sinks, or active cooling |
| Interface Mismatch | Non-standard connector or multiple voltage | Design adapters and multi-output pack configurations |
Additionally, the BMS for robotics battery enforces safety cutoffs to avoid damage. By tackling these issues through cell selection and mechanical design, we minimize service events and prevent quadruped robot battery replacement in the field.
Whether we are providing an OEM battery solution or a simple quadruped robot battery upgrade, we isolate the communication circuits. A reliable robotic dog battery must survive harsh mechanical vibrations. Every robot dog battery we design undergoes drop tests to simulate real-world falls, ensuring the internal spot welds remain intact under pressure.
Custom Battery Pack for Robotics Integration
Optimized BMS & thermal design
5. How to Choose a Reliable Battery Supplier?
Choosing a reliable battery supplier requires evaluating their engineering capabilities, prototyping speed, and mass production quality control.
A competent partner will offer transparent communication, deep experience in customization, and a proven track record of solving complex mechanical integration issues. They must possess rigorous testing facilities.

As a specialized lithium ion battery manufacturer, we understand the specific needs of the electric mobility and energy storage sectors. Our sales manager, Luke Liu, works closely with clients across North America and Western Europe to define precise technical requirements.
A reputable Long Sing Energy facility will provide full traceability for every robot dog battery replacement or original build. We focus heavily on precise engineering parameters when selecting cells. If you are developing a new system, your supplier should support you from the initial battery module robotics design to the final rollout.
A good partner does not just sell a quadruped robot dog battery; they provide a complete engineering ecosystem. They ensure your quadruped robot battery meets all safety certifications before mass deployment. We validate every robot battery through comprehensive real tests.
Supplier Evaluation Metrics
| Stage | Action | Duration |
|---|---|---|
| Simulation | Calculate torque and power to size pack | 1 week |
| Tooling | Design custom battery case mold | 3 weeks |
| Prototype Testing | Bench tests revealed voltage sag and heat; In-house BMS design | 2 weeks |
| Integration | Vibration, thermal, and cycle testing | 2 weeks |
Conclusion
Understanding the robot dog battery supplier guide from prototype to mass production ensures your engineering projects succeed. We analyzed the importance of accurate runtime calculation models, rigorous real-world testing, and proper battery pack design to overcome physical integration challenges.
By prioritizing advanced thermal management and selecting a competent supplier, you guarantee that your quadruped robotics receive reliable, uninterrupted power. A high-quality robot dog battery ultimately reduces maintenance costs, extends operational lifespan, and maximizes the dynamic performance of your advanced robotic systems.
Scale from Prototype to Mass Production
Reliable industrial supply chain
Frequently Asked Questions
Click to explore more information about Robot Dog Battery
Q: What do you call a four-legged robot?
A: A four-legged robot is commonly called a quadruped robot or robot dog. These machines are designed to mimic animal locomotion and are widely used in industrial inspection, research, and defense applications.
Q: Do robot dogs need batteries?
A: Yes, robot dogs require batteries to operate. Most modern quadruped robots rely on rechargeable battery systems to power motors, sensors, control units, and wireless communication modules.
Q: What kind of batteries are used in robots?
A: Robots typically use lithium-based batteries such as lithium-ion (Li-ion) and lithium polymer (LiPo). These batteries offer high energy density, stable discharge, and lightweight design, making them ideal for mobile robotic systems.
Q: How long does a robot dog battery last?
A: The battery life of a robot dog usually ranges from 1 to 4 hours depending on load, movement intensity, and battery capacity. Advanced energy optimization and battery pack design can significantly extend operational time.
Q: What kind of batteries are used in electric quadruped robots?
A: Electric quadruped robots commonly use high-performance lithium-ion battery packs, sometimes combined with supercapacitors for peak power support. Companies like Long Sing Energy provide customized battery solutions optimized for high discharge rates and long cycle life.
Reference:
[1]Accurate peak current planning prevents voltage sag during jumps and maneuvers.↪
[2]Understanding C-rate helps select packs that meet peak current demands without sag.↪
[3]Dissipation layers reduce hotspots and extend life under peak loads.↪
[4]A solid runtime model aligns theoretical capacity with actual performance.↪
[5]Choose appropriate connectors to ensure safe, low-resistance power delivery.↪
[6]Powering sensors requires careful voltage regulation and clean power delivery.↪
[7]CAN bus enables robust telemetry and diagnostics for quadruped robots.↪